AI BOT平台使用手册
基础信息
机器人编程
硬件连接
代码编辑
积木搭建
人工智能训练模块
01-1 数据工程(物体检测任务)
01-2 数据工程(图像分类任务)
02 模型训练
03 模型推理
04 模型编译
05 模型下载
06 TPU模型推理
本文档使用 MrDoc 发布
-
+
首页
硬件连接
# 1. 连接平台的准备工作 **在连接平台之前,需要确保设备与电脑处于同一局域网内,以下为两种连接方式,选择其中一种即可。** ## (1) WiFi连接 电脑可以连接无线网的情况下,推荐使用WiFi连接方式,让电脑与机械臂连接同一WiFi,以达到设备与电脑处于同一局域网内的目的。 <img src="/media/202504/2025-04-03_113203_3401130.17934100498994388.jpeg" alt="图片1" style="width: 70%; height: auto;"> ## (2) 虚拟网口连接(USB线) 若电脑不支持无线网功能,则可以尝试使用虚拟网口连接方式。 <img src="/media/202504/2025-04-03_113157_7986550.06782320289520116.jpeg" alt="图片1" style="width: 70%; height: auto;"> 使用USB连接线连接电脑和机械臂后,需要对机械臂进行语言交互,让机械臂进入虚拟网口模式,并播报虚拟地址: “你好,机械臂” ——“你说” “虚拟地址” ——“虚拟地址为xxx.xxx.xxx.xxx” ### 注意 ==首次使用虚拟网口连接==,需要在SK AI助手上安装【RNDIS虚拟网卡驱动】并配置【USB网络配置】,具体操作步骤如下:(这两步配置只需要进行一次即可,并不是每次使用虚拟网口连接机械臂都需要执行一次) **① 安装【RNDIS虚拟网卡驱动】:https://doc.aispore.cn/doc/206/** **② 配置【USB网络配置】:https://doc.aispore.cn/doc/208/** # 2. 连接平台 **①首页点击“连接”,进入硬件连接界面;** 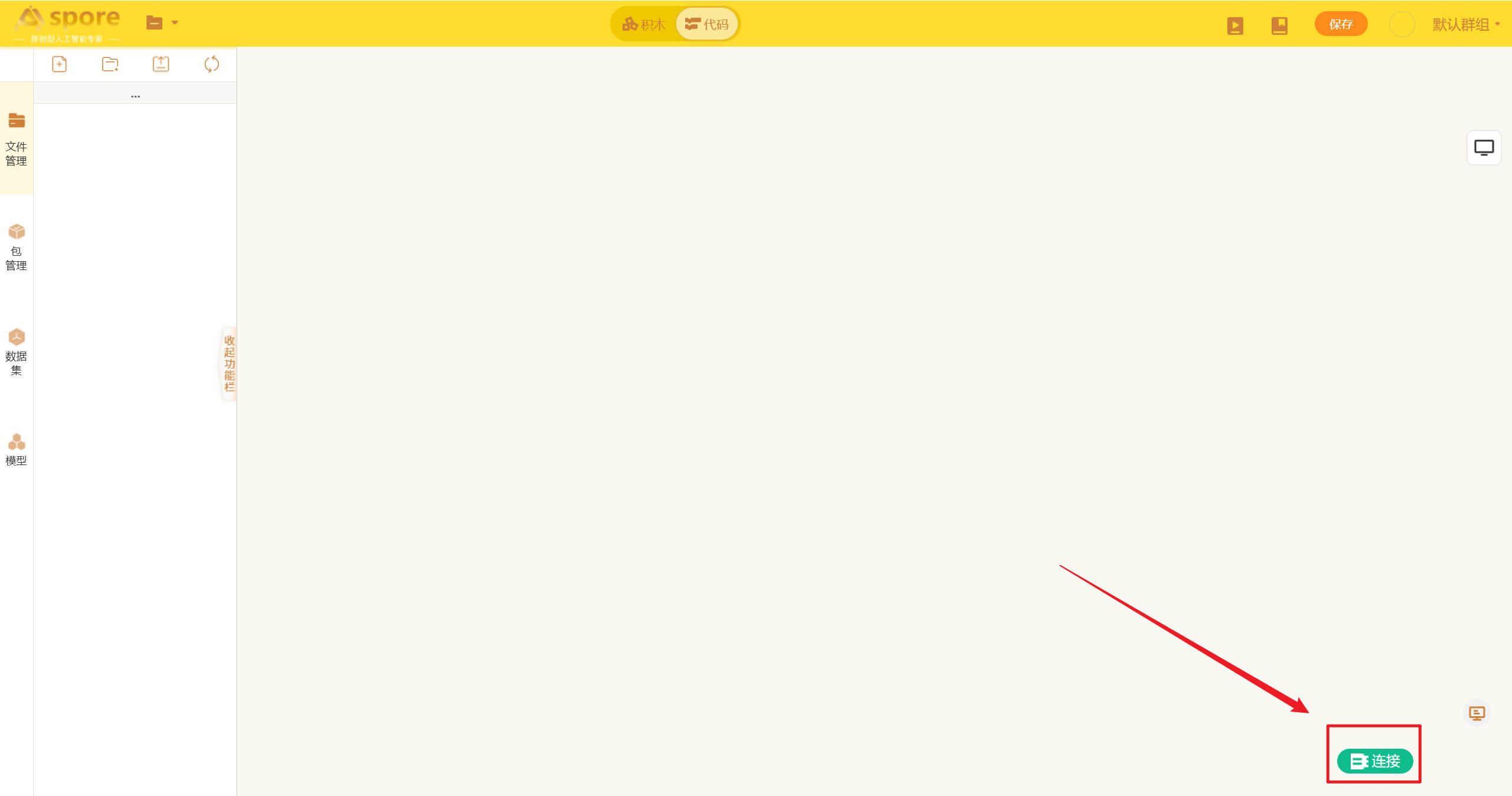 **②填入设备IP地址并点击连接** 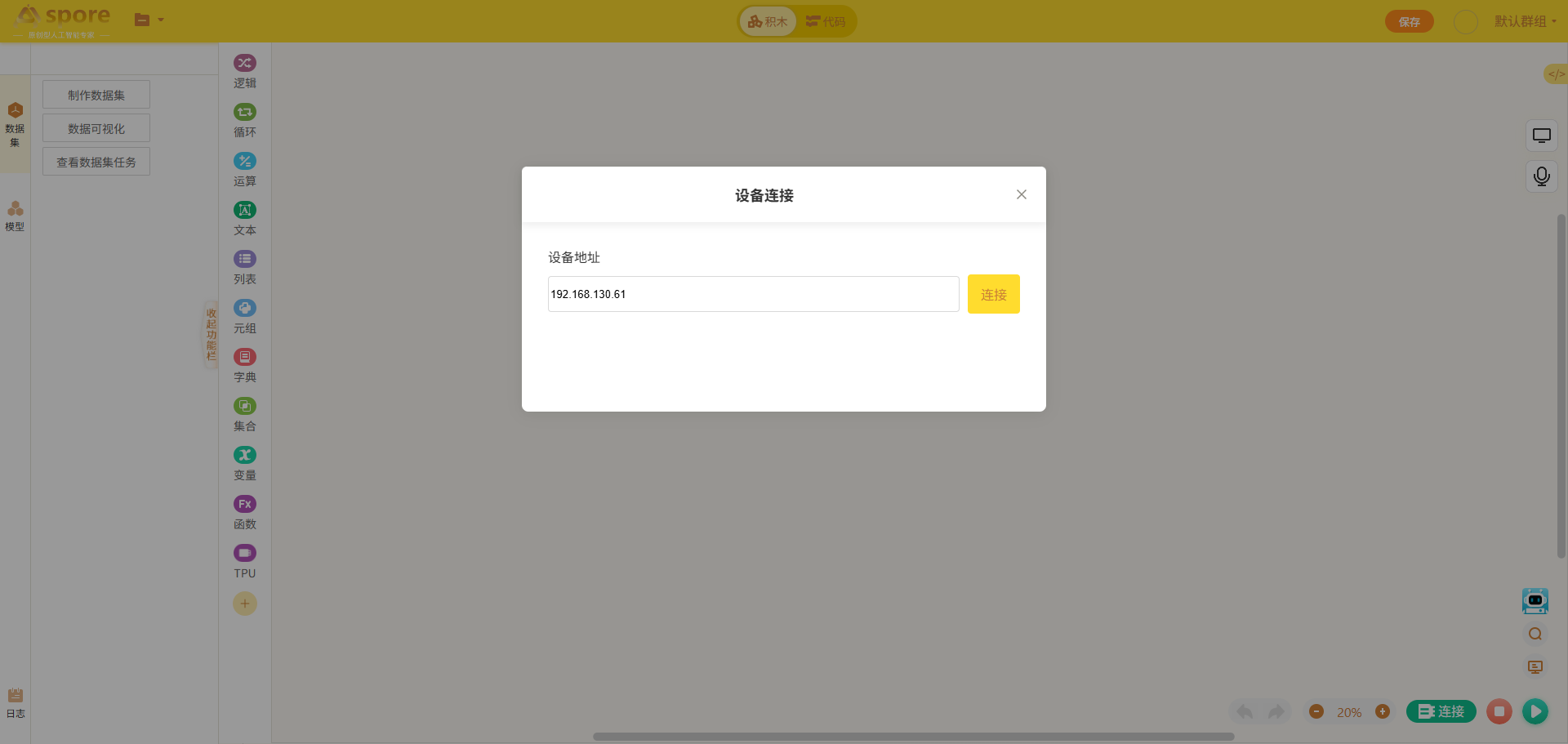 **③若出现以下提示,则选择【继续访问】**  **④新建项目/选择已有项目;** 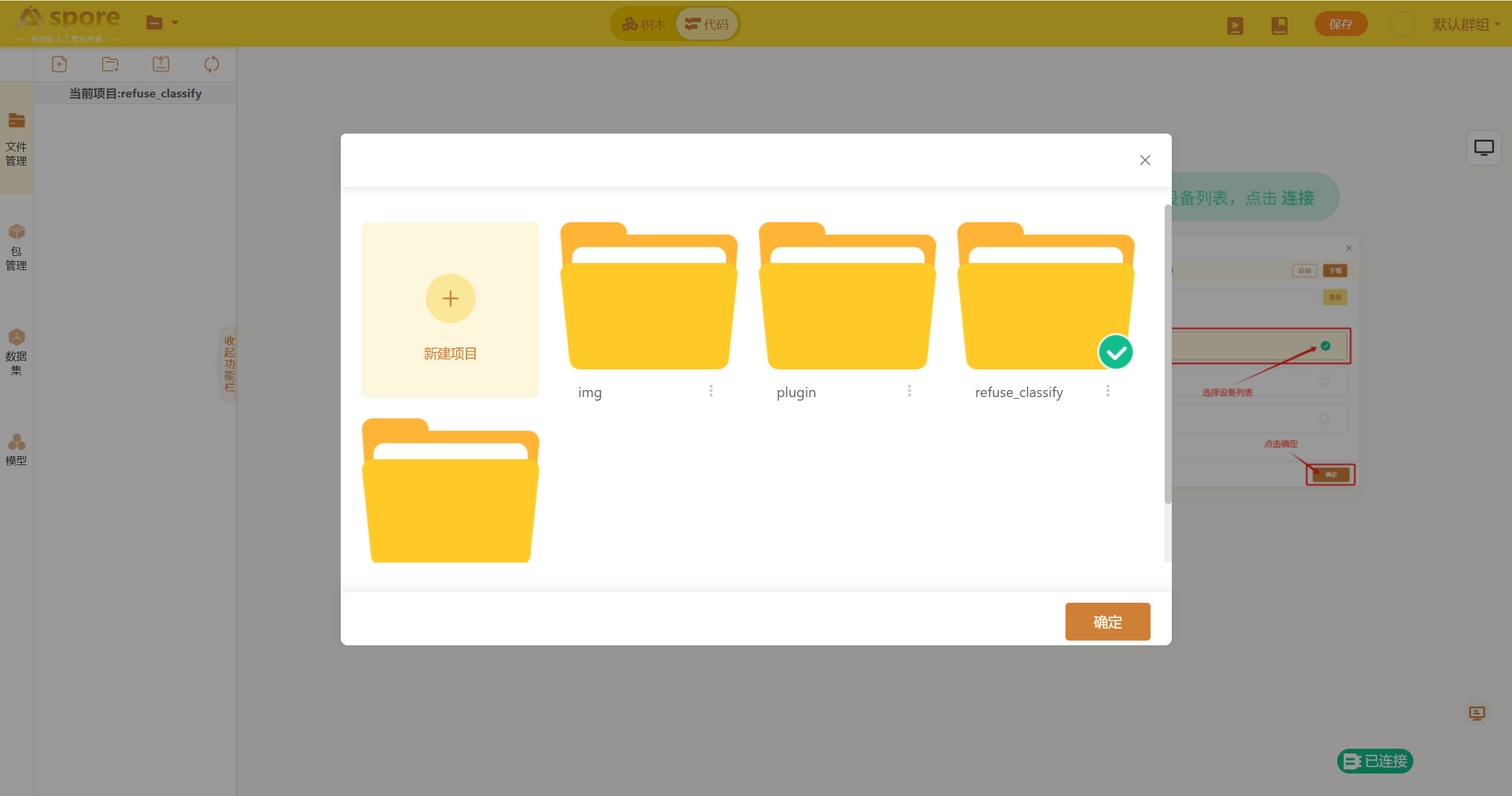
gdsoke
2026年1月29日 10:16
转发文档
收藏文档
上一篇
下一篇
手机扫码
复制链接
手机扫一扫转发分享
复制链接
Markdown文件
分享
链接
类型
密码
更新密码